



このところ、
大いに注目されている人型ロボットの開発では、
より人に近いロボットを実現するうえで
触覚センサーが鍵を握っている。
多次元触覚センシング技術を手がける
スタートアップ企業「帕西尼感知科技(PaXini Tech)」は、
この技術を駆使してロボットが
人間に近い知覚を持てるよう力を注いでいる。
人型ロボットの開発は、
両手の正確な制御抜きには語れない。
ロボットの 「皮膚」にあたる触覚センサーは、
ロボットと対象物の感触や状態をリアルタイムで感知し、
視覚センサーよりもタイムリーで
正確なフィードバックを提供するため、
器用な手の動きを調整するのに役立つ。
これは柔らかいものや、
壊れやすいもの、
複雑な形状のものを扱う場合に特に重要となる。
技術の進化に伴い、
精度や感度の低い従来の触覚センサーでは、
もはや市場の需要を満たすことはできなくなった。
ハイエンドの触覚センサーは欧米企業が
市場シェアの80%以上を占めており、
中国産触覚センサーの普及を
進めることが重要な課題となっている。
帕西尼感知科技のソリューションでは、
人型ロボットや先端製造業のニーズを満たせる
ハイエンドの触覚センサーを打ち出している。
帕西尼感知科技の製品は多次元触覚センサー、
多指多関節のロボットハンド、
人型ロボットに至るまで幅広い範囲をカバーしている。
2024年の世界ロボット大会
(WRC、World Robot Conference)では、
第2世代の多次元触覚人型ロボット
「TORA-ONE」、
第2世代の多次元触覚ロボットハンド「DexH13」、
そしてITPU(Intelligent Tactile Processing Unit)
技術に基づいた多次元触覚センサー
「PX-6AX GEN2」を発表した。
TORA-ONEは、
DexH13とPX-6AX GEN2を活用した
自由度の高い人型ロボットである。
ロボットハンドのDexH13は、
触覚と視覚を組み合わせた市場初の4本指ロボットハンドだ。
片手の自由度は13で、
持ち上げる、つまみ上げる、
溶接などの作業をこなすだけでなく、
つかみ取ったり回転させたりするなど
人間の手のように複雑な手の動きで、
優れたパフォーマンスを発揮する。
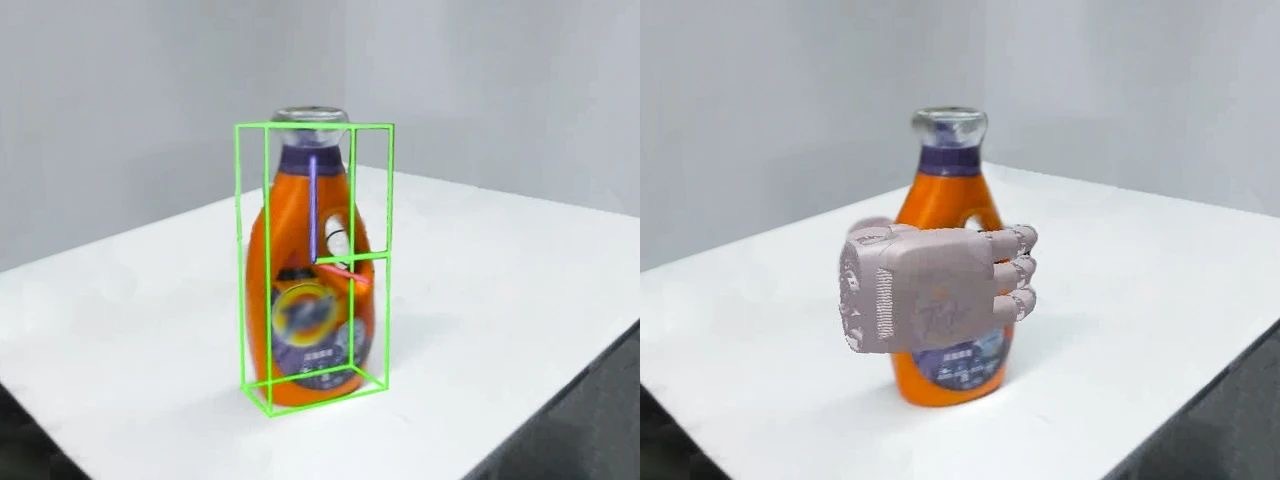
DexH13の2本の手は、
自社開発した高精度の触覚センサー
PX-6AX GEN2を約2000個搭載しており、
超高解像度で圧力感知、摩擦、質感など
15種類の検知が可能だ。
また、
800万画素の高解像度AIカメラが搭載されており、
高度な視覚アルゴリズムに基づいて、
物体の6次元姿勢検出を行い、
物をつかむことができる。
この視覚と触覚の組み合わせにより、
ロボットは複雑な環境や作業に適応することができる。
TORA-ONEは47自由度のモジュール
(胴体が21、4本指ロボットハンドが26)で構成され、
片腕の耐荷重は5キログラム。
高度なモジュール構造を採用した
脚部と胴体は安定性が高く、
腰部の可動設計により、
身長1.46〜1.86メートルの範囲で
柔軟な伸縮が可能。
運動性能に優れたロボットシャシーを備えており、
360度全方向への移動が可能なため、
物が複雑に配置された現場や
動きの多い作業環境でも
スピーディーに移動できる。
最大速度は秒速1メートル、
稼働時間は最長8時間に及ぶ。
またTORA-ONEのシャシー部分には、
LiDAR SLAM測位ナビゲーションシステムも
搭載されており、
複雑な3次元環境でも正確に位置を特定し、
さまざまな対象物や位置情報を正確に把握できるほか、
最適な経路計画や障害物回避が可能になり、
生産効率と作業の安定性を
大幅に向上させることができる。
現在、TORA-ONEは、
工業生産、医療・ヘルスケア、
倉庫管理・物流などの多くの場面の
作業に適応することができる。
例えば精密機器の組立工場に導入すれば、
TORA-ONEが触覚センサーと
マルチモーダル知覚モデルに基づいて、
部品の形状、大きさ、材質などの情報を素早く検知・判断し、
器用な手つきで精密部品の組み立てを完了し、
指定の場所まで搬送することができる。

技術の向上に伴い、
人型ロボットの活用シーンはさらに広がり、
最終的には単純作業から、
より複雑で柔軟性が求められる作業へと
移行していくと予想される。
英調査会社オムディアのレポートによると、
人型ロボットの世界出荷台数は
2027年までに1万台を超え、
2030年までに3万8000台に達し、
2024年から2030年までの年平均成長率は
83%に達する見込みだという。
<参考: >